| №ШјьЧЦЈә |
| И«ГжЧЫКцБЛКөКұТФМ«НшјјКх№ъДЪНвөДПЦЧҙЈ¬СРҫҝБЛ№ӨТөНшВзКөКұРФТӘЗуЈ¬ёшіц№ӨТөТФМ«НшәНКөКұТФМ«Нш¶ЁТеЈ¬ҪПЙоИлЖКОцБЛБщЦЦЦчТӘКөКұТФМ«НшөДНЁРЕРӯТйЎЈН¬КұВЫКцБЛКөКұТФМ«НшҪсәуөД·ўХ№ЗчКЖЎЈ |
1 №ӨТөҝШЦЖНшВзөДКөКұРФТӘЗу
ИЛГЗЦӘөАЈ¬УГУЪ№ӨТөЧФ¶Ҝ»ҜПөНіөДНшВзНЁРЕјјКхАҙФҙУЪITРЕПўјјКхөДјЖЛг»ъНшВзјјКхЈ¬ө«КЗУЦІ»Н¬УЪТ»°гөДјЖЛг»ъНшВзНЁРЕЈ¬ХвКЗТтОӘITНшВзНЁРЕКЗТФҙ«өЭРЕПўОӘЧоЦХДҝөДЈ¬¶ш№ӨТөҝШЦЖНшВзҙ«өЭРЕПўКЗТФТэЖрОпЦК»тДЬБҝөДФЛ¶ҜОӘЧоЦХДҝұкЎЈЛщТФЈ¬УГУЪІвБҝәНҝШЦЖөДКэҫЭНЁРЕөДЦчТӘМШөгКЗЈәФКРн¶ФКВјюҪшРРКөКұПмУҰөДКВјюЗэ¶ҜНЁРЕЈ»әЬёЯөДҝЙУГРФЈ»әЬёЯөДКэҫЭНкХыРФЈ»ФЪУРөзҙЕёЙИЕәНөШөзО»ІоөДЗйҝцПВДЬХэіЈ№ӨЧчЈ»ТФј°К№УГ№Өі§ДЪЧЁУГөДҙ«КдПЯөИЎЈЖдЦРЈ¬ЧоЦчТӘөДТӘЗуКЗНшВзНЁРЕөДёЯКөКұРФЎЈКөКұЈЁreal timeЈ©өДә¬ТеКЗЦёКэҫЭҙҰАнҫНПс·ўЙъФЪКэҫЭІъЙъөДКұҝМЈ¬ЖдПмУҰГ»УРҙуөДСУКұЎЈ
¶ФУЪ№ӨТөЧФ¶Ҝ»ҜПөНіАҙЛөЈ¬ДҝЗ°ёщҫЭІ»Н¬өДУҰУГіЎәПЈ¬Ҫ«КөҪшРФТӘЗу»®·ЦОӘИэёц·¶О§Ј¬ЛьГЗКЗЈәРЕПўјҜіЙәНҪПөНТӘЗуөД№эіМЧФ¶Ҝ»ҜУҰУГіЎәПЈ¬КөКұПмУҰКұјдТӘЗуКЗ100ms»тёьіӨЈ»ҫшҙу¶аКэөД№Өі§ЧФ¶Ҝ»ҜУҰУГіЎәПКөКұПмУҰКұјдөДТӘЗуЧоЙЩОӘ5Ў«10msЈ»¶ФУЪёЯРФДЬөДН¬ІҪФЛ¶ҜҝШЦЖУҰУГЈ¬МШұрКЗФЪ100ёцҪЪөгПВөДЛЕ·юФЛ¶ҜҝШЦЖУҰУГіЎәПЈ¬КөКұПмУҰКұјдТӘЗуөНУЪ1msЈ¬Н¬ІҪҙ«ЛНәН¶¶¶ҜРЎУЪ1ҰМsЎЈ№ӨТөҝШЦЖНшВзөДКөКұРФ»№№ж¶ЁБЛРн¶ајјКхЦёұкЈ¬ИзҪ»ё¶КұјдЎўНМНВБҝЎўКұјдН¬ІҪЎўКұјдН¬ІҪҫ«¶ИЎўТФј°ИЯУа»ЦёҙКұјдөИЎЈ¶ФУЪХвР©РФДЬЦёұк¶јУРПкПёөД№ж¶ЁЈ¬ИзОТ№ъЦЖ¶ЁөДЎ°УГУЪ№ӨТөІвБҝУлҝШЦЖПөНіөДEPAПөНіҪб№№УлНЁРЕұкЧјЎұөД№ъјТұкЧјЦР№ж¶ЁНшВзөДКұјдН¬ІҪҫ«¶ИОӘ8ёцөИј¶Ј¬јҙЈә0ЁDОЮҫ«¶ИТӘЗу;1ЁDКұјдН¬ІҪҫ«¶И<1s;2ЁDКұјдН¬ІҪҫ«¶И<100ms;3ЁDКұјдН¬ІҪҫ«¶И<10ms;4ЁDКұјдН¬ІҪҫ«¶И<1ms;5ЁDКұјдН¬ІҪҫ«¶И<100ҰМs;6ЁDКұјдН¬ІҪҫ«¶И<10ҰМs;7ЁDКұјдН¬ІҪҫ«¶И<1ҰМsЎЈ
2 №ӨТөТФМ«НшУлКөКұТФМ«Нш
іӨЖЪТФАҙЈ¬УЙУЪПЦіЎЧЬПЯХщТйІ»РЭЈ¬»ҘНЁУл»ҘІЩЧчОКМвәЬДСҪвҫцЈ¬УЪКЗПЦіЎЧЬПЯҝӘКјЧӘПтТФМ«НшЎЈҫӯ№эҪьјёДкөДЕ¬БҰЈ¬ТФМ«НшјјКхТСҫӯұ»№ӨТөЧФ¶Ҝ»ҜПөНі№г·әҪУКЬЎЈЦЪЛщЦЬЦӘEthernetНшВзіцПЦУЪ1975ДкЈ¬ІўУЪ1982ДкЦЖ¶ЁіЙОӘIEEE 802.3ұкЧјөДөЪТ»°жұҫЎЈ1990Дк2ФВёГұкЧјХэКҪіЙОӘISO/IEC 8802.3№ъјКұкЧјЎЈФЪХвЖЪјдЈ¬EthernetҙУЧоіх10MbpsТФМ«НшЈ¬№э¶ЙөҪ100MbpsҝмЛЩТФМ«НшәНҪ»»»КҪТФМ«НшЈ¬ЦұЦБ·ўХ№өҪҪсМмөД№вПЛТФМ«НшәННтХЧТФМ«НшЎЈҝЙТФЛөЈ¬ҝӘ·ЕөДEthernetКЗИэК®ДкАҙ·ўХ№ЧоіЙ№ҰөДНшВзјјКхЈ¬ЛьКЗФЪУлIEEE 802.4БоЕЖЧЬПЯҫЦУтНшәНIEEE 802.5БоЕЖ»·ҫЦУтНшБҪёц¶ФКЦөДҫәХщЦРНСУұ¶шіцөДЈ¬ІўөјЦВБЛТ»іЎРЕПўјјКхөДёпГьЎЈEthernetНшөДҝмЛЩ·ўХ№әН№г·әУҰУГУРБҰөШНЖ¶ҜБЛёЯјјКхРҫЖ¬әНПөНіҝӘ·ўЈ¬ҙУ¶шҙуҙуМбёЯБЛНшВзРФДЬәНҪөөНБЛПөНііЙұҫЎЈТт¶шЈ¬EthernetГҝДкФЪКАҪзЙПөД°ІЧ°Бҝі¬№эЙПТЪёцҪЪөгЎЈ
НЁіЈЈ¬ИЛГЗП°№ЯЙПҪ«УГУЪ№ӨТөҝШЦЖПөНіөДТФМ«НшНііЖОӘ№ӨТөТФМ«НшЎЈө«КЗЈ¬Из№ыЧРПё»®·ЦЈ¬°ҙХХ№ъјКөз№ӨОҜФұ»бSC65CөД¶ЁТеЈ¬№ӨТөТФМ«НшКЗУГУЪ№ӨТөЧФ¶Ҝ»Ҝ»·ҫіЈ¬·ыәПIEEE 802.3ұкЧјЈ¬°ҙХХIEEE 802.1DЎ°ГҪМе·ГОКҝШЦЖЈЁMACЈ©НшЗЕЎұ№ж·¶әНIEEE 802.1QЎ°ҫЦУтНшРйДвНшЗЕЎұ№ж·¶Ј¬¶ФЖдГ»УРҪшРРИОәОКөКұА©Х№ЈЁextensionЈ©¶шКөПЦөДТФМ«НшЎЈНЁ№эІЙУГјхЗбТФМ«НшёәәЙЎўМбёЯНшВзЛЩ¶ИЎўІЙУГҪ»»»КҪТФМ«НшәНИ«Л«№ӨНЁРЕЎўІЙУГРЕПўј¶әНБчБҝҝШЦЖј°РйДвҫЦУтНшөИјјКхЈ¬өҪДҝЗ°ОӘЦ№ҝЙТФҪ«№ӨТөТФМ«НшөДКөКұПмУҰКұјдЧцөҪ5Ў«10msЈ¬ПаөұУЪПЦУРөДПЦіЎЧЬПЯЎЈ№ӨТөТФМ«НшФЪјјКхЙПУлЙМУГТФМ«НшКЗјжИЭөДЎЈ
¶ФУЪПмУҰКұјдРЎУЪ5msөДУҰУГЈ¬№ӨТөТФМ«НшТСІ»ДЬКӨИОЈ¬ОӘБЛВъЧгёЯКөКұРФДЬУҰУГөДРиТӘЈ¬ёчҙу№«ЛҫәНұкЧјЧйЦҜ·Ч·ЧМбіцёчЦЦМбЙэ№ӨТөТФМ«НшКөКұРФөДјјКхҪвҫц·Ҫ°ёЎЈХвР©·Ҫ°ёҪЁБўФЪIEEE 802.3ұкЧјөД»щҙЎЙПЈ¬НЁ№э¶ФЖдәНПа№ШұкЧјөДКөКұА©Х№МбёЯКөКұРФЈ¬ІўЗТЧцөҪУлұкЧјТФМ«НшөДОЮ·мБ¬ҪУЈ¬ХвҫНКЗКөКұТФМ«НшЈЁReal Time EthernetЈ¬јтіЖRTEЈ©ЎЈОӘБЛ№ж·¶ХвІҝ·Ц№ӨЧчөДРРОӘЈ¬2003Дк5ФВЈ¬IEC/SC65CЧЁГЕіЙБўБЛWG11КөКұТФМ«Нш№ӨЧчЧйЈ¬ёГ№ӨЧчЧйёәФрЦЖ¶Ё IEC 61784-2Ў°»щУЪISO/IEC 8802.3өДКөКұУҰУГПөНіЦР№ӨТөНЁРЕНшВзРР№жЎұ№ъјКұкЧјЈ¬ФЪёГұкЧјЦР°ьАЁЈәCommunication Profile Family 2 Ethernet/IP;CPF 3 PROFINET;CPF4 P-NET;CPF6 Interbus;CPF10 VNET/IP;CPF11 TCNET;CPF12 EtherCAT;CPF13 Ethernet Powerlink;CPF14 EPA(ЦР№ъ);CPF15 MODBUS/TCPәНCPF16SERCOSөИ11ЦЦКөКұТФМ«НшРР№жјҜЎЈЖдЦРЈ¬°ьАЁОТ№ъEPAКөКұТФМ«НшұкЧјөД6ёцРВФцКөКұТФМ«НшҪ«ТФIEC PASЈЁPublicly Available SpecificationЈ©№«№ІҝЙУГ№ж·¶УиТФ·ўұнЎЈФЪЙПКцКөКұТФМ«НшјјКхЦРЈ¬Ҫ«УРБщёцЦчТӘөДҫәХщХЯЈәEPAЎўEtherCATЎўEthernet PowerLinkЎўPROFINETЎўMODBUS-IDAәНEthernet/IPЎЈ
3 БщЦЦЦчТӘКөКұТФМ«НшНЁРЕРӯТй·ЦОц
ёщҫЭКөКұТФМ«НшКөКұА©Х№өДІ»Н¬јјКх·Ҫ°ёЈ¬ҝЙҪ«КөКұТФМ«НшНЁРЕРӯТйДЈРН·ЦОӘ4АаЈ¬ИзНј1ЛщКҫЎЈ
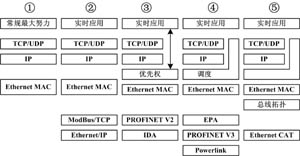
Нј1 КөКұТФМ«Нш°ҙКөКұА©Х№·Ҫ°ё·ЦАа
Нј1ЦРөДўЩКЗҫӯ№эіЈ№жЧоҙуЕ¬БҰМбёЯКөКұРФЈ¬Т»°г№ӨТөТФМ«НшөДНЁРЕРӯТйДЈРНЈ»ўЪКЗІЙУГФЪTCP/IPЦ®ЙПҪшРРКөКұКэҫЭҪ»»»·Ҫ°ёЈ»ўЫКЗІЙУГҫӯУЕ»ҜҙҰАнәНМṩЕФВ·КөКұНЁөАөДНЁРЕРӯТйДЈРНЈ»ўЬКЗІЙУГјҜЦРөч¶ИМбёЯКөКұРФөДҪвҫц·Ҫ°ёЈ»ўЭКЗІЙУГАаЛЖInterbusПЦіЎЧЬПЯЎ°јҜЧЬЦЎЎұНЁРЕ·ҪКҪәНФЪОпАнІгК№УГЧЬПЯНШЖЛҪб№№МбЙэТФМ«НшКөКұРФДЬЎЈНј1ЦРН¬КұёшіцБЛБщЦЦКөКұТФМ«НшјјКх·Ҫ°ёөД№йАаЗйҝцЎЈУЙУЪКөКұТФМ«НшјјКхЙжј°әЬ¶а·ҪГжЈ¬ПЮУЪЖӘ·щЈ¬ХвАпҪц¶ФНЁРЕРӯТйЧцјтТӘВЫКцУл·ЦОцЎЈ
3.1 EPAКөКұТФМ«Нш
EPAЈЁEthernet for Plant AutomationЈ©УГУЪ№ӨТөІвБҝУлҝШЦЖПөНіөДТФМ«НшұкЧјКЗФЪ№ъјТҝЖјјІҝЎ°863ЎұјЖ»®өДЦ§іЦПВЈ¬УЙХгҪӯҙуС§ЎўХгҙуЦРҝШЎўЦРҝЖФәЙтСфЧФ¶Ҝ»ҜЛщЎўЦШЗмУКөзС§ФәЎўҙуБ¬Ан№ӨҙуС§ЎўЗе»ӘҙуС§өИөҘО»БӘәПіЙБўөДұкЧјЖрІЭ№ӨЧчЧйЖрІЭЎЈ
EPAНшВзНШЖУҪб№№ИзНј2ЛщКҫЈ¬ЛьУЙБҪј¶НшВзЧйіЙЈ¬јҙ№эіМјаҝШј¶L2НшәНПЦіЎЙиұёј¶L1НшЎЈ
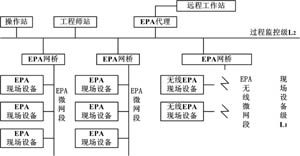
Нј2 EPAПөНіНшВзНШЖУҪб№№
ПЦіЎЙиұёј¶L1НшУГУЪ№ӨТөЙъІъПЦіЎөДёчЦЦПЦіЎЙиұёЈЁИзұдЛНЖчЎўЦҙРР»ъ№№әН·ЦОцТЗЖчөИЈ©Ц®јдТФј°ПЦіЎЙиұёУлL2НшөДБ¬ҪУЈ»№эіМјаҝШј¶L2НшЦчТӘУГУЪҝШЦЖКТТЗұнЎўЧ°ЦГТФј°ИЛ»ъҪУҝЪЦ®јдөДБ¬ҪУЎЈОЮВЫКЗL1Нш»№КЗL2НшЈ¬ҫщҝЙ·ЦОӘТ»ёц»тјёёцОўНш¶ОЎЈ
ФЪEPAПөНіЦРЈ¬Ҫ«ҝШЦЖНшВз»®·ЦОӘИфёЙёцҝШЦЖЗшУтЈ¬ГҝёцҝШЦЖЗшУтјҙОӘТ»ёцОўНш¶ОЎЈГҝёцОўНш¶ОНЁ№эEPAНшЗЕУлЖдЛьНш¶О·ЦёфЈ¬ёГОўНш¶ОДЪEPAЙиұёјдөДНЁРЕұ»ПЮЦЖФЪұҫҝШЦЖЗшУтДЪҪшРРЈ¬¶шІ»»бХјУГЖдЛьНш¶ОөДҙшҝнЧКФҙЎЈҙҰУЪІ»Н¬ОўНш¶ОДЪөДEPAЙиұёјдөДНЁРЕЈ¬РиУЙПаУҰөДEPAНшЗЕЧӘ·ўҝШЦЖЎЈ
ОӘБЛМбёЯНшВзөДКөКұРФДЬЈ¬EPA¶ФISO/IEC 8802.3РӯТй№ж¶ЁөДКэҫЭБҙВ·ІгҪшРРБЛА©Х№Ј¬ФЪЖдЦ®ЙПФцјУБЛТ»ёцEPAНЁРЕөч¶И№ЬАнКөМеЈЁCommunication Scheduling Management EntityЈ¬јтіЖEPA-CSMEЈ©ЎЈEPA-CSMEІ»ёДұдIEC 8802.3КэҫЭБҙВ·ІгМṩёшDLS-UserөД·юОсЈ¬ТІІ»ёДұдУлОпАнІгөДҪУҝЪЈ¬Ц»КЗНкіЙ¶ФКэҫЭұЁОДөДөч¶И№ЬАнЎЈёГКэҫЭБҙВ·ІгДЈРНИзНј3ЛщКҫЎЈ
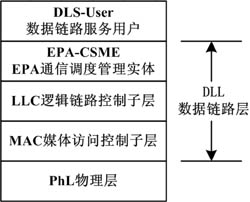
Нј3 EPAКэҫЭБҙВ·ІгДЈРН
EPA-CSMEНЁРЕөч¶И№ЬАнКөМеЦ§іЦЈәНкИ«»щУЪCSMA/CDөДЧФУЙҫәХщөДНЁРЕөч¶ИәН»щУЪ·ЦКұ·ўЛНөДИ·¶ЁРФНЁРЕөч¶ИЎЈ¶ФУЪөЪТ»ЦЦНЁРЕөч¶ИЈ¬EPA-CSMEЦұҪУҙ«КдDLEУлDLS-UserЦ®јдҪ»»ҘөДКэҫЭЈ¬¶шІ»ЧчИОәО»әҙжәНҙҰАнЎЈ¶ФУЪөЪ¶юЦЦНЁРЕөч¶ИЈ¬ГҝёцEPAЙиұёЦРөДEPA-CSMEҪ«DLS-Use DATAёщҫЭКВПИЧйМ¬әГөДҝШЦЖКұРтәНУЕПИј¶ҙуРЎЈ¬ҙ«ЛНёшDLEЈ¬УЙDLEҙҰАнәуНЁ№эPhLE·ўЛНөҪНшВзЈ¬ТФұЬГвБҪёцЙиұёФЪН¬Т»КұҝМПтНшВзЙПН¬Кұ·ўЛНКэҫЭЈ¬ұЬГвұЁОДЕцЧІЎЈПВГжҪйЙЬEPAНЁРЕөч¶ИөДҫЯМе№жіМЎЈ
ФЪТ»ёцEPAОўНш¶ОДЪЈ¬ЛщУРEPAЙиұёөДНЁРЕҫщ°ҙЦЬЖЪҪшРРЈ¬НкіЙТ»ёцНЁРЕЦЬЖЪЛщРиөДКұјдTіЖОӘТ»ёцНЁРЕәкЦЬЖЪЎЈНЁРЕәкЦЬЖЪT·ЦОӘБҪёцҪЧ¶ОЈ¬өЪТ»ёцҪЧ¶ООӘЦЬЖЪұЁОДҙ«КдҪЧ¶ОTpЈ¬өЪ¶юёцҪЧ¶ООӘ·ЗЦЬЖЪұЁОДҙ«КдҪЧ¶ОTnЈ¬ИзНј4ЛщКҫЎЈ

Нј4 EPAНЁРЕөч¶ИКҫТвНј
ФЪЦЬЖЪұЁОДҙ«КдҪЧ¶ОTpЈ¬ГҝёцEPAЙиұёПтНшВзЙП·ўЛНөДұЁОДКЗ°ьә¬ЦЬЖЪКэҫЭөДұЁОДЎЈЦЬЖЪКэҫЭКЗЦёУл№эіМУР№ШөДКэҫЭЈ¬ИзРиТӘ°ҙҝШЦЖ»ШВ·өДҝШЦЖЦЬЖЪҙ«КдөДІвБҝЦөЎўҝШЦЖЦөЈ¬»т№ҰДЬҝйКдИлЎўКдіцЦ®јдРиТӘ°ҙЦЬЖЪёьРВөДКэҫЭЎЈЦЬЖЪұЁОДөД·ўЛНУЕПИј¶УҰОӘЧоёЯЎЈ
ФЪ·ЗЦЬЖЪұЁОДҙ«КдҪЧ¶ОTnЈ¬ГҝёцEPAЙиұёПтНшВзЙП·ўЛНөДұЁОД°ьә¬·ЗЦЬЖЪКэҫЭөДұЁОДЎЈ·ЗЦЬЖЪКэҫЭКЗЦёУГУЪТФ·ЗЦЬЖЪ·ҪКҪФЪБҪёцНЁРЕ»п°йјдҙ«КдөДКэҫЭЈ¬ИзіМРтөДЙППВФШКэҫЭЎўұдБҝ¶БРҙКэҫЭЎўКВјюНЁЦӘЎўЗчКЖұЁёжөИКэҫЭЈ¬ТФј°ЦоИзARPЎўRARPЎўHTTPЎўFTPЎўTFTPЎўICHPЎўIGMPөИУҰУГКэҫЭЎЈ·ЗЦЬЖЪұЁОД°ҙЖдУЕПИј¶ёЯөНЎўIPөШЦ·ҙуРЎј°КұјдУРР§·ҪКҪ·ўЛНЎЈ
EPAКөКұТФМ«НшұкЧј¶ЁТеБЛ»щУЪISO/IEC 8802.3ЎўRFC 791ЎўRFC 768әНRFC 793өИРӯТйөДEPAПөНіҪб№№ЎўКэҫЭБҙВ·ІгРӯТйЎўУҰУГІг·юОс¶ЁТеУлРӯТй№ж·¶Ј¬ТФј°»щУЪXMLөДЙиұёГиКц№ж·¶ЎЈёГ№ж·¶ГжПтҝШЦЖ№ӨіМКҰөДУҰУГКөјКЈ¬ФЪ№ШјьјјКх№Ҙ№ШөД»щҙЎЙПЈ¬ҪбәП№ӨіМУҰУГКөјщЈ¬РОіЙБЛОўНш¶О»ҜПөНіҪб№№ЎўИ·¶ЁРФНЁРЕөч¶ИЎўЧЬПЯ№©өзЎў·ЦІгНшВз°ІИ«ҝШЦЖІЯВФЎўИЯУа№ЬАнЎўИэј¶КҪБҙВ··ГОК№ШПөЎў»щУЪXMLөДЙиұёГиКцУпСФөИ·ҪГжөДМШЙ«Ј¬ІўУөУРНкИ«өДЧФЦчЦӘК¶ІъИЁЎЈДҝЗ°Ј¬EPAТСУР¶аЦЦІъЖ·Ј¬°ьАЁ»щУЪEPAөДұдЛНЖчЎўЦҙРРЖчЎўПЦіЎҝШЦЖЖчЎўКэҫЭІЙјҜЖчЎўФ¶іМ·ЦЙўҝШЦЖХҫЎўОЮЦҪјЗВјТЗөИІъЖ·Ј¬»щУЪEPAөД·ЦІјКҪНшВзҝШЦЖПөНіТСФЪ»Ҝ№Өі§өГөҪіЙ№ҰУҰУГЎЈ
3.2 Ethernet/IPКөКұТФМ«Нш
Ethernet/IPКөКұТФМ«НшјјКхУЙControlNet№ъјКЧйЦҜCIЎў№ӨТөТФМ«НшРӯ»бIEAәНҝӘ·ЕөДDeviceNet№©УҰЙМРӯ»бODVAөИ№ІН¬ҝӘ·ўөД№ӨТөНшВзұкЧјЎЈ
Ethernet/IPКөКұА©Х№іЙ№ҰЦ®ҙҰФЪУЪTCP/IPЦ®ЙПёҪјУCIPЈЁCommon Industrial ProtocolЈ©Ј¬ФЪУҰУГІгҪшРРКөҪшКэҫЭҪ»»»әНФЛРРКөКұУҰУГЈ¬ЖдНЁРЕРӯТйДЈРНИзНј5ЛщКҫЎЈ
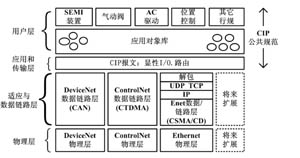
Нј5 Ethernet/IPНЁРЕРӯТйДЈРН
CIPөДҝШЦЖІҝ·ЦУГУЪКөКұI/OұЁОД»тТюРОұЁОДЎЈCIPөДРЕПўІҝ·ЦУГУЪұЁОДҪ»»»Ј¬ТІіЖЧчПФРФұЁОДЎЈControlNetЎўDeviceNetәНEthernet/IP¶јК№УГёГРӯТйНЁРЕЈ¬ИэЦЦНшВз·ЦПнПаН¬өД¶ФПуҝвЈ¬¶ФПуәНЧ°ЦГРР№жК№өГ¶аёц№©УҰЙМөДЧ°ЦГДЬФЪЙПКцИэЦЦНшВзЦРКөПЦјҙІејҙУГЎЈEthernet/IPДЬ№»УГУЪҙҰАн¶аҙпГҝёц°ь1 500ёцЧЦҪЪөДҙуЕъБҝКэҫЭЈ¬ЛьТФҝЙУиұЁ·ҪКҪ№ЬАнҙуЕъБҝКэҫЭЎЈ
2003ДкODVAЧйЦҜҪ«IEEE 1588ҫ«И·КұјдН¬ІҪРӯТйУГУЪEthernet/IPЈ¬ЦЖ¶ЁБЛCIPsyncұкЧјТФҪшТ»ІҪМбёЯEthernet/IPөДКөКұРФЎЈёГұкЧјТӘЗуГҝГлЦУУЙЦчҝШЦЖЖч№гІҘТ»ёцН¬ІҪ»ҜРЕәЕөҪНшВзЙПөДёчёцҪЪөгЈ¬ТӘЗуЛщУРҪЪөгөДН¬ІҪҫ«¶ИЧјИ·өҪОўГлј¶ЎЈОӘҙЛЈ¬РҫЖ¬ЦЖФмЙМФцјУТ»ёцЎ°јУЛЩЎұПЯВ·өҪТФМ«НшРҫЖ¬Ј¬ҙУ¶шҪ«РФДЬёДЙЖөҪ500әБОўГлөДҫ«¶ИЎЈУЙҙЛҝЙјыЈ¬CIPsyncКЗCIPөДКөКұА©Х№ЎЈ
3.3 Modbus-IDAКөКұТФМ«Нш
ModbusЧйЦҜәНIDAЈЁInterface for Distributed AutomationЈ©јҜНЕ¶јЦВБҰУЪҪЁБў»щУЪEthernet TCP/IPәНWeb»ҘБ¬НшјјКхөД·ЦІјКҪЦЗДЬЧФ¶Ҝ»ҜПөНіЈ¬ОӘБЛМбёЯҫәХщБҰЈ¬2003Дк10ФВЈ¬БҪёцЧйЦҜРыІјәПІўЈ¬БӘКЦҝӘ·ўModbus-IDAКөКұТФМ«НшЎЈ
Нј6 Modbus-IDAНЁРЕРӯТйДЈРН
Modbus-IDAКөКұА©Х№өД·Ҫ°ёКЗОӘТФМ«НшҪЁБўТ»ёцРВөДКөКұНЁРЕУҰУГІгЈ¬ІЙУГТ»ЦЦРВөДНЁРЕРӯТйRTPSЈЁReal-Time Publish/SubscribeЈ©КөПЦКөКұНЁРЕЈ¬ёГРӯТйөДКөПЦФтУЙТ»ёцЦРјдјюАҙНкіЙЎЈModbus-IDAНЁРЕРӯТйДЈРНИзНј6ЛщКҫЈ¬ёГДЈРНҪЁБўФЪГжПт¶ФПуөД»щҙЎЙПЈ¬ХвР©¶ФПуҝЙТФНЁ№эAPIУҰУГіМРтҪУҝЪұ»УҰУГІгөчУГЎЈНЁРЕРӯТйН¬КұМṩКөКұ·юОсәН·ЗКөКұ·юОсЎЈ·ЗКөКұНЁРЕ»щУЪTCP/IPРӯТйЈ¬ід·ЦІЙУГITіЙКмјјКхЈ¬Из»щУЪНшТіөДХп¶ПәНЕдЦГЈЁHTTPЈ©ЎўОДјюҙ«КдЈЁFTPЈ©ЎўНшВз№ЬАнЈЁSNMPЈ©ЎўөШЦ·№ЬАнЈЁBOOTP/DHCPЈ©әНУКјюНЁЦӘЈЁSMTPЈ©өИЈ»КөКұНЁРЕ·юОсҪЁБўФЪRTPSКөКұ·ўІјХЯ/ФӨ¶©ХЯДЈКҪәНModbusРӯТйЦ®ЙПЎЈRTPSРӯТйј°ЖдУҰУГіМРтҪУҝЪЈЁAPIЈ©УЙТ»ёц¶ФёчЦЦЙиұё¶јТ»ЦВөДЦРјдјюАҙКөПЦЈ¬ЛьІЙУГГА№ъRTIЈЁReal-Time InnovationsЈ©№«ЛҫөДNDDS 3.0ЈЁNetwork Data Delivery ServiceЈ©КөКұНЁРЕПөНіЎЈRTPSҪЁБўФЪPubilsh/SubscribeДЈКҪ»щҙЎЙПЈ¬ІўҪшРРБЛА©Х№Ј¬ФцјУБЛЙиЦГКэҫЭ·ўЛНҪШЦ№КұјдЎўҝШЦЖКэҫЭБчЛЩВКәНК№УГ¶аЦ·№гІҘөИ№ҰДЬЎЈЛьҝЙТФјт»ҜОӘТ»ёцКэҫЭ·ўЛНХЯәН¶аёцКэҫЭҪУКХХЯЦ®јдНЁРЕұаіМөД№ӨЧчЈ¬ј«ҙуөШјхЗбНшВзөДёәәЙЎЈRTPS№№ҪЁФЪUDPРӯТйЦ®ЙПЈ¬ModbusРӯТй№№ҪЁФЪTCPРӯТйЦ®ЙПЎЈ
3.4 PROFINETКөКұ№ӨТөТФМ«Нш
PROFINETКөКұ№ӨТөТФМ«НшКЗУЙProfibus InternationalЈЁPIЈ©ЧйЦҜМбіцөД»щУЪТФМ«НшөДЧФ¶Ҝ»ҜұкЧјЎЈҙУ2004ДкҝӘКјЈ¬PIУлInterbus ClubЈЁInterbusЧЬПЯҫгАЦІҝЈ©БӘКЦЈ¬ёәФрәПЧчҝӘ·ўУлЦЖ¶ЁұкЧјЎЈPROFINET№№іЙҙУI/Oј¶ЦұЦБРӯөч№ЬАнј¶өД»щУЪЧйјюөД·ЦІјКҪЧФ¶Ҝ»ҜПөНіөДМеПөҪб№№·Ҫ°ёЈ¬PROFIBUSјјКхәНINTERBUSПЦіЎЧЬПЯјјКхҝЙТФФЪХыёцПөНіЦРОЮ·мөШјҜіЙЎЈ
PROFINETТСУРИэёц°жұҫЈ¬ФЪХвР©°жұҫЦРЈ¬PROFINETМбіцБЛ¶ФIEEE 802.1DәНIEEE 1588ҪшРРКөКұА©Х№өДјјКх·Ҫ°ёЈ¬Іў¶ФІ»Н¬КөКұТӘЗуөДРЕПўІЙУГІ»Н¬өДКөКұНЁөАјјКхЎЈPROFINETНЁРЕРӯТйДЈРНИзНј7ЛщКҫЎЈ
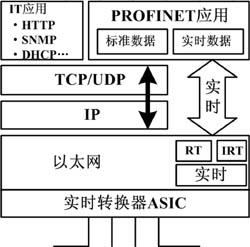
Нј7 PROFINETНЁРЕРӯТйДЈРН
ҙУНј7ЦРҝЙТФҝҙіцЈ¬PROFINETМṩһёцұкЧјНЁРЕНЁөАәНБҪАаКөКұНЁРЕНЁөАЎЈұкЧјНЁөАКЗК№УГTCP/IPРӯТйөД·ЗКөКұНЁРЕНЁөАЈ¬ЦчТӘУГУЪЙиұёІОКэ»ҜЎўЧйМ¬әН¶БИЎХп¶ПКэҫЭЎЈКөКұНЁөАRTКЗИнКөКұSRTЈЁSoftware RTЈ©·Ҫ°ёЈ¬ЦчТӘУГУЪ№эіМКэҫЭөДёЯРФДЬСӯ»·ҙ«КдЎўКВјюҝШЦЖөДРЕәЕУлұЁҫҜРЕәЕөИЎЈЛьЕФВ·өЪИэІгәНөЪЛДІгЈ¬Мṩҫ«И·НЁРЕДЬБҰЎЈОӘУЕ»ҜНЁРЕ№ҰДЬЈ¬PROFINETёщҫЭIEEE 802.1p¶ЁТеБЛұЁОДөДУЕПИј¶Ј¬Чо¶аҝЙУГ7ј¶ЎЈКөКұНЁөАIRTІЙУГБЛIRTЈЁIsochronous Real-TimeЈ©өИКұН¬ІҪКөКұөДASICРҫЖ¬Ҫвҫц·Ҫ°ёЈ¬ТФҪшТ»ІҪЛх¶МНЁРЕХ»ИнјюөДҙҰАнКұјдЈ¬МШұрККУГУЪёЯРФДЬҙ«КдЎў№эіМКэҫЭөДөИКұН¬ІҪҙ«КдЎўТФј°ҝмЛЩөДКұЦУН¬ІҪФЛ¶ҜҝШЦЖУҰУГЈ¬ФЪ1msКұјдЦЬЖЪДЪЈ¬КөПЦ¶Ф100¶аёцЦбөДҝШЦЖЈ¬¶ш¶¶¶ҜІ»Чг1ҰМsЎЈ
3.5 Ethernet PowerLinkКөКұТФМ«Нш
Ethernet PowerLinkУЙ°ВөШАыB&R№«ЛҫУЪ2001ДкҝӘ·ўЈ¬ІўФЪ2002ДкіЙБўБЛEPSGЈЁEthernet PowerLink Standardigation GroupЈ©ЧйЦҜЎЈEPSGөДХҪВФ»п°йУРCIA/CANOpenЈ¬ХвКЗЙиұёј¶НЁРЕРӯТйәНРР№жөДУГ»§јҜНЕТФј°IAONA№ӨТөЧФ¶Ҝ»ҜҝӘ·ЕНшВзМеПөҪб№№јҜНЕөИЎЈ
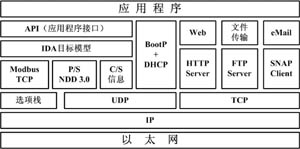
PowerLinkРӯТй¶ФөЪ3әНөЪ4ІгөДTCP/UDP/IPХ»ҪшРРБЛКөКұА©Х№ЎЈФцјУөД»щУЪTCP/IPөДAsyncЦРјдјюУГУЪТмІҪКэҫЭҙ«КдЈ¬IsochronөИКұЦРјдјюУГУЪҝмЛЩЎўЦЬЖЪөДКэҫЭҙ«КдЎЈPowerLinkНЁРЕРӯТйДЈРНИзНј8ЛщКҫЎЈ
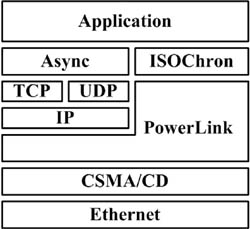
Нј8 PowerLinkНЁРЕРӯТйДЈРН
ҙУНј8ҝЙҝҙіцЈ¬ PowerLinkХ»ҝШЦЖЧЕНшВзЙПөДКэҫЭБчБҝЎЈEthernet PowerLinkұЬГвНшВзЙПКэҫЭіеН»өД·Ҫ·ЁКЗІЙУГSCNMЈЁSlot Communication Network ManagementЈ©КұјдЖ¬НЁРЕНшВз№ЬАн»ъЦЖЎЈSCNMДЬ№»ЧцөҪОЮіеН»өДКэҫЭҙ«КдЈ¬ЧЁУГөДКұјдЖ¬УГУЪөч¶ИөДөИКұН¬ІҪҙ«ЛНөДКөКұКэҫЭЈ»№ІПнөДКұјдЖ¬УГУЪТмІҪөДКэҫЭҙ«КдЎЈФЪНшВзЙПЈ¬Ц»ДЬЦё¶ЁТ»ёцХҫОӘ№ЬАнХҫЈ¬ЛьОӘЛщУРНшВзЙПөДЖдЛьХҫҪЁБўТ»ёцЕдЦГұнәН·ЦЕдөДКұјдЖ¬Ј¬Ц»УР№ЬАнХҫДЬҪУКХәН·ўЛНКэҫЭЈ¬ЖдЛьХҫЦ»УРФЪ№ЬАнХҫКЪИЁПВІЕДЬ·ўЛНКэҫЭЎЈОӘҙЛPowerLinkРиТӘІЙУГ»щУЪIEEE 1588өДКұјдН¬ІҪЎЈ
3.6 EtherCATКөКұТФМ«Нш
EtherCATЈЁEthernet for Control Automation TechnologyЈ©УЙөВ№ъBeckhoff№«ЛҫҝӘ·ўЈ¬ІўөГөҪETGЈЁEtherCAT Technolgy GroupЈ©ЧйЦҜөДЦ§іЦЎЈEtherCATКЗТ»ёцҝЙУГУЪПЦіЎј¶өДі¬ёЯЛЩI/OНшВзЈ¬ЛьК№УГұкЧјөДТФМ«НшОпАнІгәНіЈ№жөДТФМ«НшҝЁЈ¬ГҪМеҝЙОӘЛ«ҪКПЯ»т№вПЛЎЈ
EthernetјјКхУГУЪПЦіЎј¶өДЧоҙуОКМвКЗНЁРЕР§ВКөНЈ¬УГУЪҙ«ЛНПЦіЎКэҫЭөДEthernetЦЎЧо¶МОӘ84ЧЦҪЪЈЁ°ьАЁ·ЦЧйјдП¶IPGЈ©ЎЈ°ҙХХАнВЫјЖЛгЦөЈ¬ТФМ«НшөДНЁРЕР§ВКҪцОӘ0.77%Ј¬InterbusПЦіЎЧЬПЯөДНЁРЕР§ВКёЯҙп52%ЎЈУЪКЗЈ¬EtherCATІЙУГБЛАаЛЖInterbusјјКхөДјҜЧЬЦЎөИКұНЁРЕөДФӯАнЈ¬ИзНј9ЛщКҫЎЈEtherCATҝӘ·ўБЛЧЁУГASICРҫЖ¬FMMUЈЁFieldbus Memory Management UnitЈ©УГУЪI/OДЈҝйЈ¬ ХвСщТ»АҙЈ¬EtherCATҝЙІЙУГұкЧјТФМ«НшЦЎЈ¬ІўТФМШ¶ЁөД»·ЧҙНШЖУ·ўЛНКэҫЭЈ¬ФЪFMMUПЦіЎЧЬПЯҙжҙўЖч№ЬАнөҘФӘөДҝШЦЖПВЈ¬НшВзЙПөДГҝёцХҫЈЁ»тI/OөҘФӘЈ©ҫщҙУТФМ«НшЦЎЙПИЎЧЯУлёГХҫУР№ШөДКэҫЭЈ¬»тХЯІеИлёГХҫТӘКдіцөДКэҫЭЎЈEtherCAT»№НЁ№эДЪІҝУЕПИј¶ПөНіЈ¬К№КөКұТФМ«НшЦЎұИЖдЛьКэҫЭЦЎУРҪПёЯөДУЕПИј¶ЎЈЧйМ¬КэҫЭЦ»ФЪКөКұКэҫЭөДҙ«КдјдП¶ЖЪјдҙ«ЛН»тНЁ№эЧЁУГНЁөАҙ«ЛНЎЈEtherCATІЙУГIEEE 1588КұјдН¬ІҪ»ъЦЖКөПЦ·ЦІјКҪКұЦУҫ«И·Н¬ІҪЎЈҙУ¶шК№EtherCATҝЙТФФЪ30ҰМsДЪҙҰАн1 000ёцҝӘ№ШБҝЈ¬»тФЪ50ҰМsДЪҙҰАн200ёц16О»ДЈДвБҝЈ¬ЖдНЁРЕДЬБҰҝЙТФК№100ёцЛЕ·юЦбөДҝШЦЖЎўО»ЦГәНЧҙМ¬КэҫЭФЪ100ҰМsДЪёьРВЎЈ
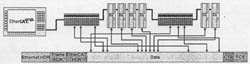
Нј9 EtherCATјҜЧЬЦЎөИКұНЁРЕ