√‚÷į…ý√ų£ļĪĺÕÝ’ĺő™Ļę“ś–‘ÕÝ’ĺ£¨≤Ņ∑÷–ŇŌĘņī◊‘ÕݬÁ£¨»ÁĻŻ…śľįĻůÕÝ’ĺĶń÷™ ∂≤ķ»®£¨«Žľį Ī∑īņ°£¨ő“√«≥–ŇĶĶŕ“Ľ Īľš…ĺ≥ż£°
This website is a public welfare website, part of the information from the Internet, if it involves the intellectual property rights of your website, please timely feedback, we promise to delete the first time.
ĶÁĽįTel: 19550540085: QQļŇ: 929496072 or ” ŌšEmail: Lng@vip.qq.com
’™“™:ő™Ńň»∑Ī£ļ£…ŌĽýī°…Ť ©£¨»Á∑ÁѶ∑ĘĶÁĽķĽÚ”Õ∆Ý…ķ≤ķ…Ť ©Ķńį≤»ę£¨∂®∆ŕľž≤ť”Žő¨Ľ§ «Īō≤ĽŅ……ŔĶń°£»Ľ∂Ý£¨‘ŕňģŌ¬ĹÝ––ĶńĻ§◊ų≤ĽĹŲłī‘”°ĘįļĻů£¨∂Ý«“∂‘ī” ¬’‚ŌÓĻ§◊ųĶń«Īňģ‘ĪņīňĶ“≤īś‘ŕŌŗĶĪīůĶń∑ÁŌ’°£ňģŌ¬“£ŅōĽķ∆ų»ň£®ROV£©“—ĺ≠ĪĽ”√”ŕľŗ≤‚ļ£…Ō◊ ≤ķĶń◊īŅŲ°£Ķę»ÁĹŮĶń∑Ę’Ļ«ų ∆ «’‚–©ňģ..
|
ő™Ńň»∑Ī£ļ£…ŌĽýī°…Ť ©£¨»Á∑ÁѶ∑ĘĶÁĽķĽÚ”Õ∆Ý…ķ≤ķ…Ť ©Ķńį≤»ę£¨∂®∆ŕľž≤ť”Žő¨Ľ§ «Īō≤ĽŅ……ŔĶń°£»Ľ∂Ý£¨‘ŕňģŌ¬ĹÝ––ĶńĻ§◊ų≤ĽĹŲłī‘”°ĘįļĻů£¨∂Ý«“∂‘ī” ¬’‚ŌÓĻ§◊ųĶń«Īňģ‘ĪņīňĶ“≤īś‘ŕŌŗĶĪīůĶń∑ÁŌ’°£ňģŌ¬“£ŅōĽķ∆ų»ň£®ROV£©“—ĺ≠ĪĽ”√”ŕľŗ≤‚ļ£…Ō◊ ≤ķĶń◊īŅŲ°£Ķę»ÁĹŮĶń∑Ę’Ļ«ų ∆ «’‚–©ňģŌ¬Ľķ∆ų»ňĹę–Ť“™≥§∆ŕÕ£ŃŰ‘ŕļ£÷–£¨≥…ő™ňýőĹĶńňģŌ¬≥£◊§AUV£¨ĽĻŅ…‘ŕňģ÷–◊‘÷ų◊ų“Ķ£¨Õ¨ Ī‘ŕĪō“™ ĪŅ…ĹÝ––‘∂≥ŐŅō÷∆°£ ”…Ķ¬Ļķ»ňĻ§÷«ń‹—–ĺŅ÷––ń(DFKI)ŃžĶľĶńŃ™√ň‘ŕMare-ITŌÓńŅ÷–Ņ™∑Ę≥Ų“ĽŐ◊’ŻŐŚĹ‚ĺŲ∑Ĺįł£¨ņī ĶŌ÷’‚“Ľ‘łĺį£ļ“Ľ÷÷īī–¬–ÕňęĪŘAUV£¨Ņ…”√”ŕłī‘”Ķńľž≤ť”Žő¨–řĻ§◊ų£¨≤ĘŇšĪł«ŅīůĶńITĽýī°…Ť ©£¨ń‹ĻĽ÷ĪĻŘĶōŅō÷∆”Žľŗ≤‚ł√ŌĶÕ≥£¨ĽĻŅ…”Ž≤Ŕ◊ų‘ĪĹÝ––”––ßĶń–ŇŌĘŃųĹĽĽ•°£
”…»ňĻ§÷«ń‹£®AI£©∑Ĺ∑®≤ŔŅōĶńňģŌ¬◊‘÷ųĽķ∆ų»ň£®AUVs£©£¨Ņ…”√”ŕľž≤ť°ĘĪ£—Ý°Ęő¨–řňģŌ¬…Ť ©°£
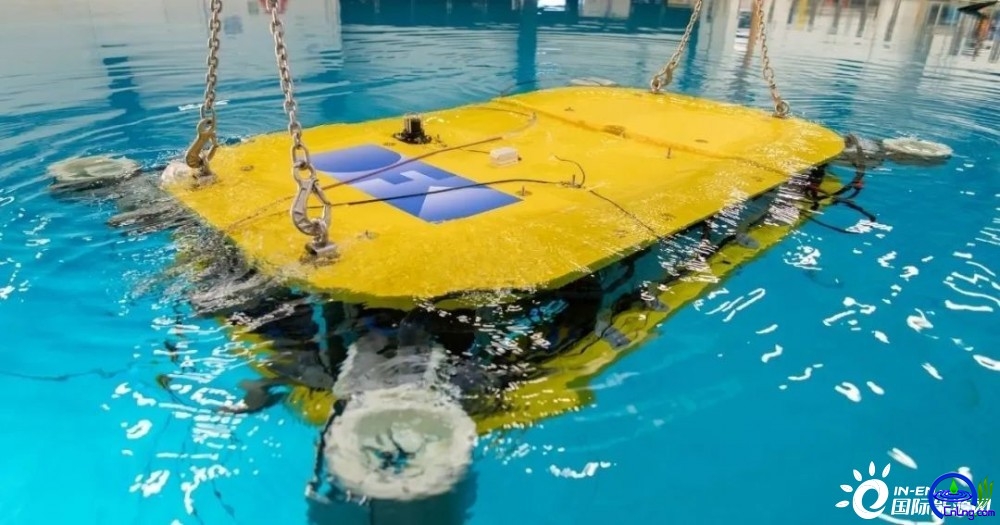
“Ľ√Ż—–ĺŅ‘Ī‘ŕ”ĺ≥ōĪŖ‘Ķľž≤‚AUV‘ŕňęĪŘń£ ĹŌ¬Ķń∑ņ◊≤«ťŅŲ°£(Õľ∆¨ņī‘ī£ļDFKIĶńThomas Frank) 01.◊‘÷ų‘∂≥Őľž≤ť”Žő¨Ľ§Ķńīī–¬–ÕňęĪŘAUV DFKIĽķ∆ų»ňľľ űīī–¬÷––ń‘ŕMare-ITŌÓńŅ÷–≥…Ļ¶…Ťľ∆≤Ę÷∆‘žŃňCuttlefishňģŌ¬◊‘÷ųĽķ∆ų»ň£¨’‚ «“Ľ÷÷Ņ…‘ŕňģ÷–◊‘”…∂®őĽĶńł…‘§–ÕAUV°£’‚ŅÓīī–¬–ÕAUV‘ŕ∆šłĻ≤ŗį≤◊įŃňŃĹłŲ…Óļ£◊•»°ŌĶÕ≥£¨ Ļ∆šń‹ĻĽ≤Ŕ◊›ňģŌ¬őÔŐŚ°£ņŻ”√’‚÷÷Őō ‚…Ťľ∆ļÕĽý”ŕ»ňĻ§÷«ń‹ĶńŅō÷∆£¨Ņ…‘ŕŌ¬«ĪĻż≥Ő÷–łńĪš÷ō–ń”Žł°Ń¶£¨≤Ę“‘ő»∂®Ķń∑Ĺ ĹĶų’ŻļÕĪ£≥÷»őļő∑ĹŌÚ°£≥żŃňÕÍ»ę◊‘÷ų‘ň––÷ģÕ‚£¨ł√Ľķ∆ų»ňĽĻŅ…ņŻ”√Ļ‚ŌňĶÁņ¬£¨“‘ĽžļŌń£ Ĺ£®ňýőĹĶńľŗ∂Ĺ◊‘÷ų£©‘ň––°£’‚÷÷ĽžļŌń£ Ĺ Ļ»ň√«Ņ…‘ŕňģŌ¬ĹŠĻĻĶńĻōľŁ◊ų“Ķ∆ŕľš£¨ł…‘§”Ž‘∂≥ŐŅō÷∆AUV°£ ≥żŃňĽķ–ĶĪŘ÷ģÕ‚£¨ł√ŌĶÕ≥ĽĻŇšĪłŃň–Ū∂ŗ”√”ŕĽ∑ĺ≥ł–÷™Ķńīęł–∆ų£¨ņż»Á…ýń…īęł–∆ų°Ę’’ŌŗĽķ°Ęľ§Ļ‚…®√Ť“«”ŽīŇѶľ∆°£ő™Ńň”––ßī¶ņŪīůŃŅĶńīęł–∆ų żĺ›£¨—–ĺŅ»ň‘ĪŅ™∑Ę≥Ų“Ľ÷÷Őō ‚Ķńľ‹ĻĻłŇńÓ£¨Ņ…÷ĪĹ”‘ŕĽķ∆ų»ň…Ō∂‘ żĺ›ŃųĹÝ––∑÷…Ę∑÷őŲ°£īňÕ‚£¨ĽĻŅ…ŇšĪłŃň“ĽłŲĪÍ◊ľĹ”Ņŕ£¨Ņ… ĶŌ÷AUV°ĘŅō÷∆’唎ńŕ≤Ņ“ĶőŮĽýī°…Ť ©÷ģľšĶńňęŌÚ żĺ›ĹĽĽĽ°£
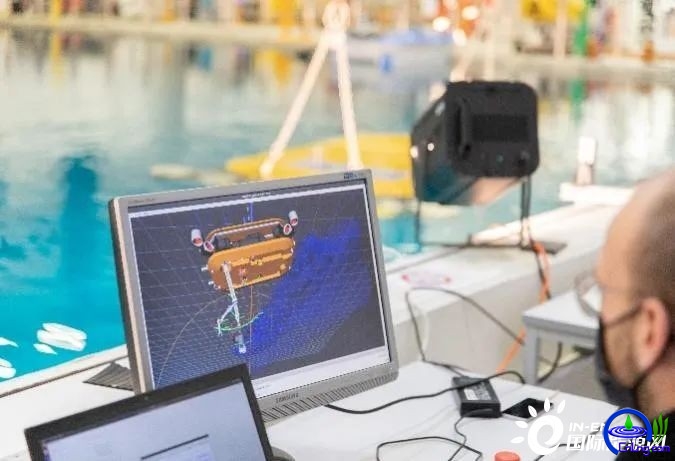
AUV÷ĪŃĘ”ŕňģ÷–£¨…ž≥ŲĽķ–ĶĪŘ°£(Õľ∆¨ņī‘ī£ļDFKIĶńThomas Frank) 02.÷ĪĻŘ“£ŅōAUV”Ž»ň‘žīŇ≥°∂®őĽĶń–ťń‚łĪľ› Ľ DFKI»Ō÷™ł®÷ķŌĶÕ≥—–ĺŅ≤Ņ√ŇŅ™∑ĘĶń–ťń‚łĪľ› Ľ£¨Ņ…‘ŕ“£Ņō»őőŮ∆ŕľšő™Ņō÷∆’ĺ»ň‘ĪŐŠĻ©÷ß≥÷°£ňŁŇšĪłŃňőĘ»ŪHoloLensÕ∑Ō‘£¨Ņ…”ŽŅō÷∆’ĺĹŠļŌ Ļ”√£¨“≤Ņ…“‘◊ųő™Ķ•∂ņĶń«Š–ÕĹĽĽ•√ĹĹť£¨ņż»Á‘ŕī¨…Ō Ļ”√°£ĹŤ÷ķŌ‘ ĺ∆ų…ŌĶń»ęŌĘ»żő¨Ō‘ ĺ£¨≤Ŕ◊ų»ň‘ĪŅ…ňś ĪŃňĹ‚AUV”ŽňģŌ¬ĹŠĻĻĶń◊īŐ¨°£ņŻ”√”Ô“ŰĹĽĽ•Ļ¶ń‹£¨ń‹ĻĽŌ‘ ĺ≥Ųīęł–∆ų–ŇŌĘ°Ę≤‚ŃŅ÷Ķ£¨“‘ľįňý…Ť÷√ĶńĺĮĪ®°£Ņ…Õ®Ļż”Ô“Ű√ŁŃÓŅō÷∆AUVĶń…„ŌŮÕ∑£¨ĹŠļŌ—Ř«Úłķ◊Ŕľľ ű£¨ľžňų≥Ų»ň√«ĶĪ«į’ż‘ŕĻŘ≤žĶńĽýī°…Ť ©◊ťľĢĶń–ŇŌĘ°£īňÕ‚£¨ĽĻŅ…“‘‘ŕ»őőŮ∆ŕľš£¨…Ť∂®◊‘ľļĶń”Ô“Ű ű”Ô£¨≤ĘĹę∆š◊ųő™Īū√Ż Ļ”√£¨ņż»Á£¨”√”ŕ…„ŌŮĽķĽÚőĽ÷√∂‘Ĺ”°£ ő™Ńňņ©’Ļīī–¬–ÕĹĽĽ•ľľ ű£¨DFKI«∂»Ž Ĺ÷«ń‹—–ĺŅ≤Ņ√Ň‘ŕMare-ITŌÓńŅ÷–Ņ™∑ĘŃň“ĽłŲÕݬÁ”¶”√≥Ő–Ú£¨Ņ…“‘Õ®Ļż÷«ń‹ ÷ĽķĽÚ∆ĹįŚĶÁń‘Ķ»“∆∂Į…ŤĪłŅō÷∆AUV≤ĘłńĪš∆š≤ő ż…Ť÷√°£īňÕ‚£¨—–ĺŅ»ň‘ĪĽĻ—–ĺŅŃň Ļ”√»ň‘ž’ŮĶīīŇ≥°ņī∂®őĽňģŌ¬Ľķ∆ų»ňĶńŅ…ń‹–‘°£
AUV“‘÷ĪŃĘ◊ň ∆‘ŕňģŌ¬÷ī––≤Ŕ◊›»őőŮ°£(Õľ∆¨ņī‘ī£ļDFKIĶńThomas Frank) 03.«ŅīůÕ∆ĹÝ∆ų”Ž÷«ń‹Ņō÷∆ ĶŌ÷łŖ–ß‘ň∂Į WITTENSTEINÕݬÁĶÁĽķĻęňĺŅ™∑Ę°Ę…ķ≤ķŃň”√”ŕ«ż∂ĮAUVĶńłŖ«Ņ∂»Õ∆ĹÝ∆ų°£’‚÷÷Õ∆ĹÝ∆ųĶńÕ∆ѶłŖīÔ500Ň£∂Ŕ£¨ĺŖ”–∑ņļ£ňģ«÷ īĶńĻ¶ń‹£¨ ”√”ŕłŖīÔ6000√◊Ķńňģ…Ó°£‘ŕ÷∆‘žĻż≥Ő÷–√Ľ”– Ļ”√“ļŐŚŐÓŃŌ£¨≤…”√ŃňŐō ‚ĶńĻŗ∑‚ľľ ű£¨“‘Ī‹√‚∂‘Ľ∑ĺ≥‘ž≥…ĽĮ—ßő£ļ¶°£Õ∆ĹÝ∆ųŇšŐ◊ĶńňŇ∑ĢĪš∆Ķ∆ų£¨”Ķ”–◊®√Ň”ŽÕ∆ĹÝ∆ųĶÁĽķŌŗ∆•ŇšĶńőřīęł–∆ųŅō÷∆£¨Ņ…‘ŕ’ŻłŲňŔ∂»∑∂őßńŕŐŠĻ©◊ľ»∑°ĘłŖ∂»∂ĮŐ¨ĶńňŔ∂»Ņō÷∆£¨÷Ī÷Ń–ż◊™ĶńŃĹłŲ∑ĹŌÚ∂ľī¶”ŕĺ≤÷Ļ◊īŐ¨°£ł√AUVŇšĪłŃňįňłŲ’‚—ýĶńÕ∆ĹÝ∆ų£¨‘ŕÕݬÁł≤ł«∑∂őßńŕ£¨’‚–©Õ∆ĹÝ∆ųń‹ĻĽ ĶŌ÷AUV”ŽňģŌ¬ĹŠĻĻ∂‘Ĺ”ňý–ŤĶńłŖĺę∂»‘ň∂Į°£ 04.ň‹‘ž’ŻļŌĻ‹ņŪŅÚľ‹‘Ų«ŅĽ•Õ®–‘ ‘ŕMare-ITŌÓńŅ÷–£¨SAPĻęňĺ—–ĺŅŃň»Áļő“‘ľį‘ŕļő÷÷ŐűľĢŌ¬Ĺę◊‘÷ųŌĶÕ≥£®ņż»ÁAUV£©’ŻļŌĶĹ‘∆ŌĶÕ≥Ķ»ITĽýī°…Ť ©÷–°£ő™īň£¨ł√ĻęňĺŅ™∑Ę≥ŲĻ§“Ķ4.0≤őŅľľ‹ĻĻĶńļň–ń◊ť≥…≤Ņ∑÷--Ļ‹ņŪŅÚľ‹£¨ ĶŌ÷Ńň ż◊÷¬Ō…ķ”Ž…Ő“Ķ”¶”√Ķń’ŻļŌ°£ł√Ļ‹ņŪŅÚľ‹Ņ…‘ŕ»őļő÷∆‘ž…ŐĶńĹ‚ĺŲ∑Ĺįł÷ģľšīÓĹ®Ľ•Õ®–‘°£ňŁĹĶĶÕŃň’ŻļŌ≥…Ī唎Ļ§◊ųŃŅ£¨”»∆š «ĶĪ∂ŗľ“Ļęňĺ∂ľ“™∑√ő ż◊÷¬Ō…ķĶń żĺ› Ī°£SAPĻęňĺő™ľ∆Ľģńŕ°Ęľ∆ĽģÕ‚Ķńő¨Ľ§Ńų≥Ő∂ľ…Ťľ∆ŃňĻ‹ņŪŅÚľ‹‘≠–Õ£¨ņż»Áļ£Ķ◊ĹŠĻĻĶńłŰņŽ∑ß°£»ÁĹŮ£¨SAP◊ ≤ķĻ‹ņŪ÷«ń‹‘∆”¶”√Ņ…Õ®ĻżłŰņŽ∑ßĶńĻ‹ņŪŅÚľ‹∆Ű∂Įīňņŗő¨Ľ§◊ų“Ķ£¨≤ĘŅ…ī”ňģŌ¬Ľķ∆ų»ňń«ņÔĹ” ’ĶĹ÷ī––◊īŐ¨Ķń∑īņ°°£Ķ√“ś”ŕĻ‹ņŪŅÚľ‹£¨∆šňŻłų∑ĹĶń»őļőŌĶÕ≥∂ľŅ…ĪĽŐŪľ”ĽÚĪĽ∆šňŻŌĶÕ≥»°īķ£¨«“őř–ŤŐę∂ŗ’ŻļŌĻ§◊ų°£
ł√AUV’żī¶”ŕľ› Ľ◊īŐ¨£¨∆šĽķ–ĶĪŘ“—ĪĽ’ŘĶĢ ’Ľō°£(Õľ∆¨ņī‘ī£ļDFKIĶńThomas Frank) 05.ňģŌ¬ĹŠĻĻőřňūľž≤‚ľľ ű ROSENĻęňĺ «»ę«ÚŃžŌ»Ķńń‹‘ī––“Ķīů–ÕĹŠĻĻÕÍ’Ż–‘Ļ‹ņŪĹ‚ĺŲ∑ĹįłĻ©”¶…Ő£¨‘ŕł√ŌÓńŅ÷–ő™AUVŅ™∑Ę≥Ųňń÷÷≤ĽÕ¨Ķń≤‚ŃŅľľ ű£¨”√”ŕľž≤ťłų÷÷ļ£Ķ◊ĹŠĻĻĶń◊īŅŲ°£’‚–©ľľ ű∑÷Īū «£ļľž≤‚ŐķīŇĹŠĻĻĶńīŇ≥°īęł–∆ų°Ę≤‚ŃŅ“űľęĪ£Ľ§ŌĶÕ≥ĶÁ≥°Ķńīęł–∆ų£¨“‘ľįņŻ”√AUVĽķ–ĶĪŘņī≤‚ŃŅĺ÷≤ŅĪŕļŮĶń≥¨…ý≤®”Žő–Ńųīęł–∆ų°£īňÕ‚£¨ĽĻŅ™∑Ę≥Ų“Ľ÷÷Õ®–Ňł°ĪÍ£¨“‘»∑Ī£Ľķ∆ų»ňŅ…Õ®Ļżňģ÷ýĹę żĺ›īę š÷Ń÷–—ŽŅō÷∆’ĺ°£°Ī |